半球形タイヤを用いた全方向移動ロボットの開発
研究概要
通常の車輪を用いた移動機構では、横方向の移動やその場での旋回は困難である。そのため方向転換には多くの作業スペースを必要とし、工場内で用いる搬送車両などでは、効率よく作業することができない。
また現在、要介護者が様々な場所を移動できるような車椅子の需要も高まっており、様々な移動機構の開発が行われている。
そこで本研究では、上述の問題を解決するため、あらゆる方向に移動できる全方向移動ロボットの開発を目的とした。さらに半球形タイヤを考案し、それを用いた全方向移動ロボットを製作した。
 |
 |
 |
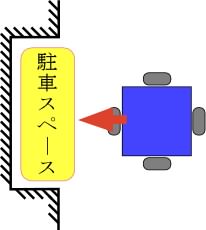
| 切り返しなしで駐車 |
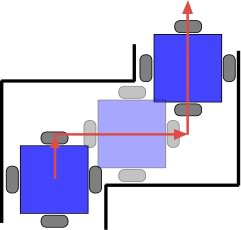
クランク状の狭い通路 |
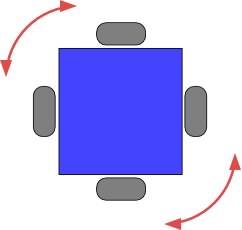
その場で方向転換 |
半球形タイヤとは?
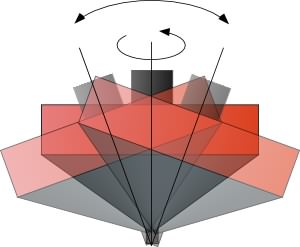
全方向移動ロボットを実現するために、今日までフリーローラ機構や、直行車輪機構など様々な機構が開発されたが、本研究室で考案した半球形タイヤはコマの軸が傾いたときに回転しながら進む現象を利用している。
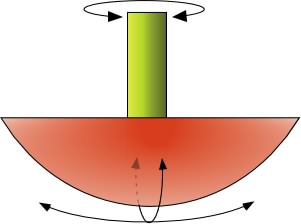
下が球面のタイヤをつくり、回転軸を傾けることでタイヤの接地点が回転軸を中心とする円周上へ変化し、あらゆる方向へ進むことができる。
この半球形タイヤを用いることで次のような利点がある。
- 速度変化が滑らかに行える。
- 動作が俊敏。
- ロボットの姿勢が変わらない
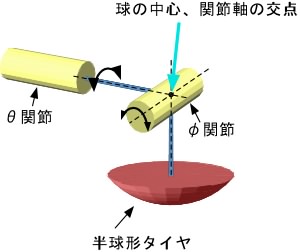 またこれを実現するために、左下図に示すように図の前後方向に回転するθ関節と図の左右方向に回転するφ関節によって回転軸を傾ける機構を考案した。
またこれを実現するために、左下図に示すように図の前後方向に回転するθ関節と図の左右方向に回転するφ関節によって回転軸を傾ける機構を考案した。
タイヤの球の中心を2つの関節の回転軸が交わるところと同じにすることで、タイヤを傾けても球の中心が常に同じ位置にあるようにしている。
全方向移動ロボット
現状
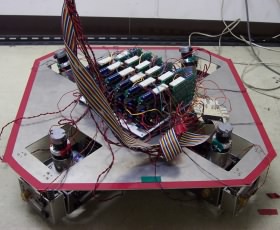
- 半球形タイヤを用いた全方向移動ロボットの開発を行った。
- 各脚のタイヤの向きとロボットの進行方向の関係を求めるため、ロボットの運動学を求めた。
- ロボットの動作の確認のために実験装置を開発した。