多自由度駆動機構を用いたロボットとしては
- 腱駆動型
- 複数のアクチュエータを使用する方法
- 特殊な歯車や機構を使用する方法
- 空気圧を利用する方法
本研究では少ないアクチュエータでロボットを駆動する省アクチュエータ機構を提案し、このロボットに搭載する関節機構の試作を行った。
少ないアクチュエータでレスキュー活動は可能か?
上記のような省アクチュエータ駆動を実現した場合、レスキュー活動を行えるかどうか検討を行ってみる。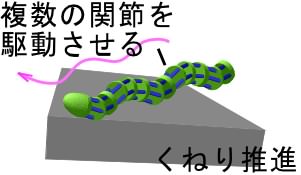 ヘビ型ロボットがくねり前進を行うには、複数のアクチュエータを用いて複数の関節を同時に駆動させる必要がある(左上図)。
ヘビ型ロボットがくねり前進を行うには、複数のアクチュエータを用いて複数の関節を同時に駆動させる必要がある(左上図)。
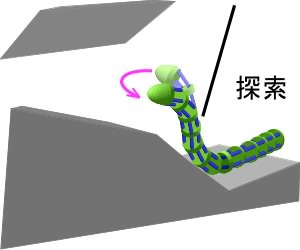
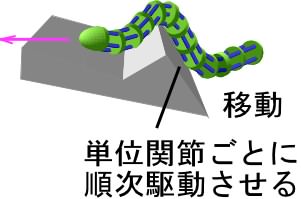 探索活動や狭い場所を移動するには、単位関節ごとに屈曲や伸縮をすることで移動が可能である(中図および下図)。
探索活動や狭い場所を移動するには、単位関節ごとに屈曲や伸縮をすることで移動が可能である(中図および下図)。
 アクチュエータの動力を各関節に伝達し、単位関節ごとに動作させれば、少ないアクチュエータでヘビ型ロボットの駆動が可能である。
アクチュエータの動力を各関節に伝達し、単位関節ごとに動作させれば、少ないアクチュエータでヘビ型ロボットの駆動が可能である。
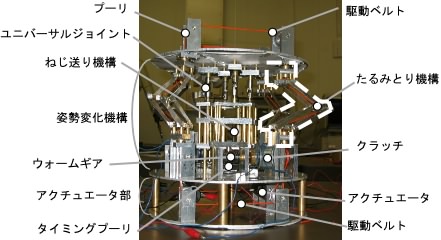 省アクチュエータを実現するため、関節部に左写真のような姿勢変化機構を考案し、試作した。
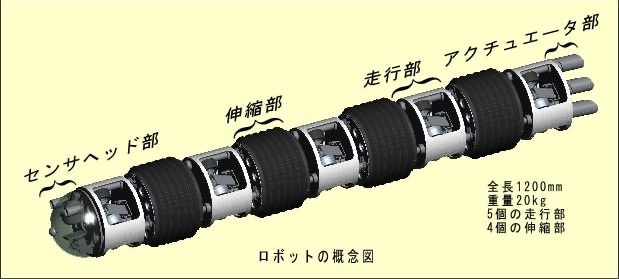
省アクチュエータを実現するため、関節部に左写真のような姿勢変化機構を考案し、試作した。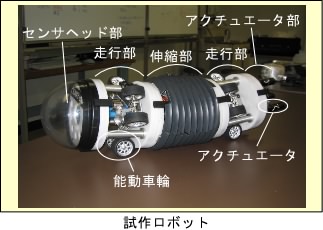 現在試作しているロボットを左図に示す。
現在試作しているロボットを左図に示す。