Mobility Robot
研究背景
自律と操縦が融合した
インテリジェント立ち乗り電動モビリティシステムの開発
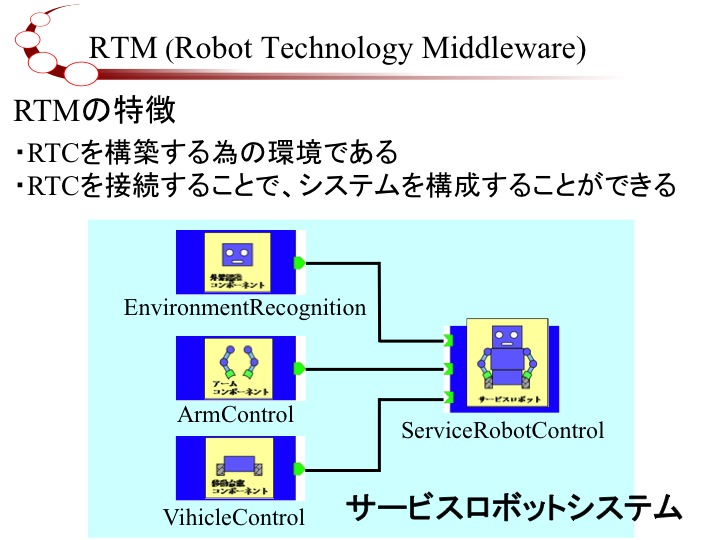
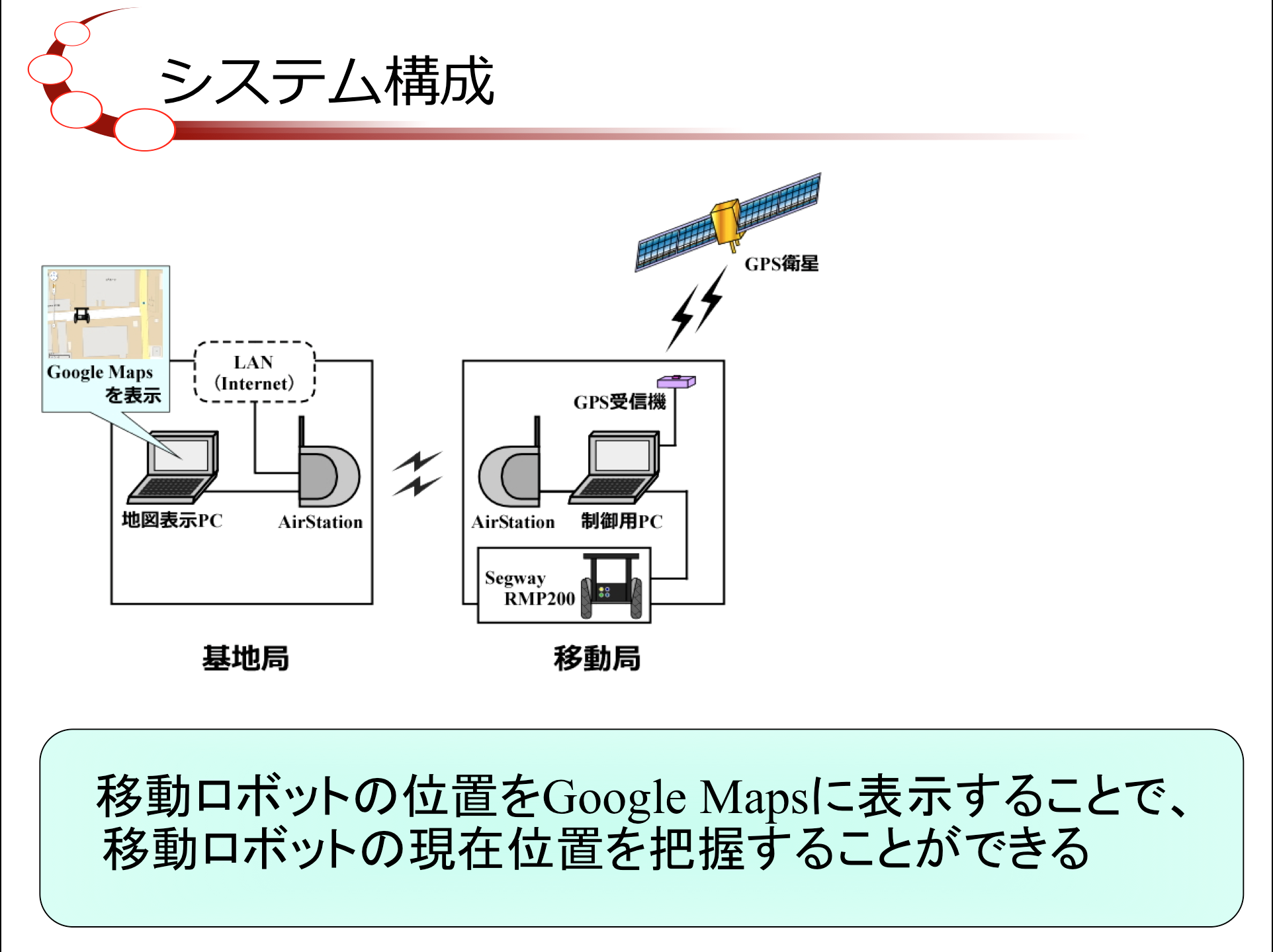
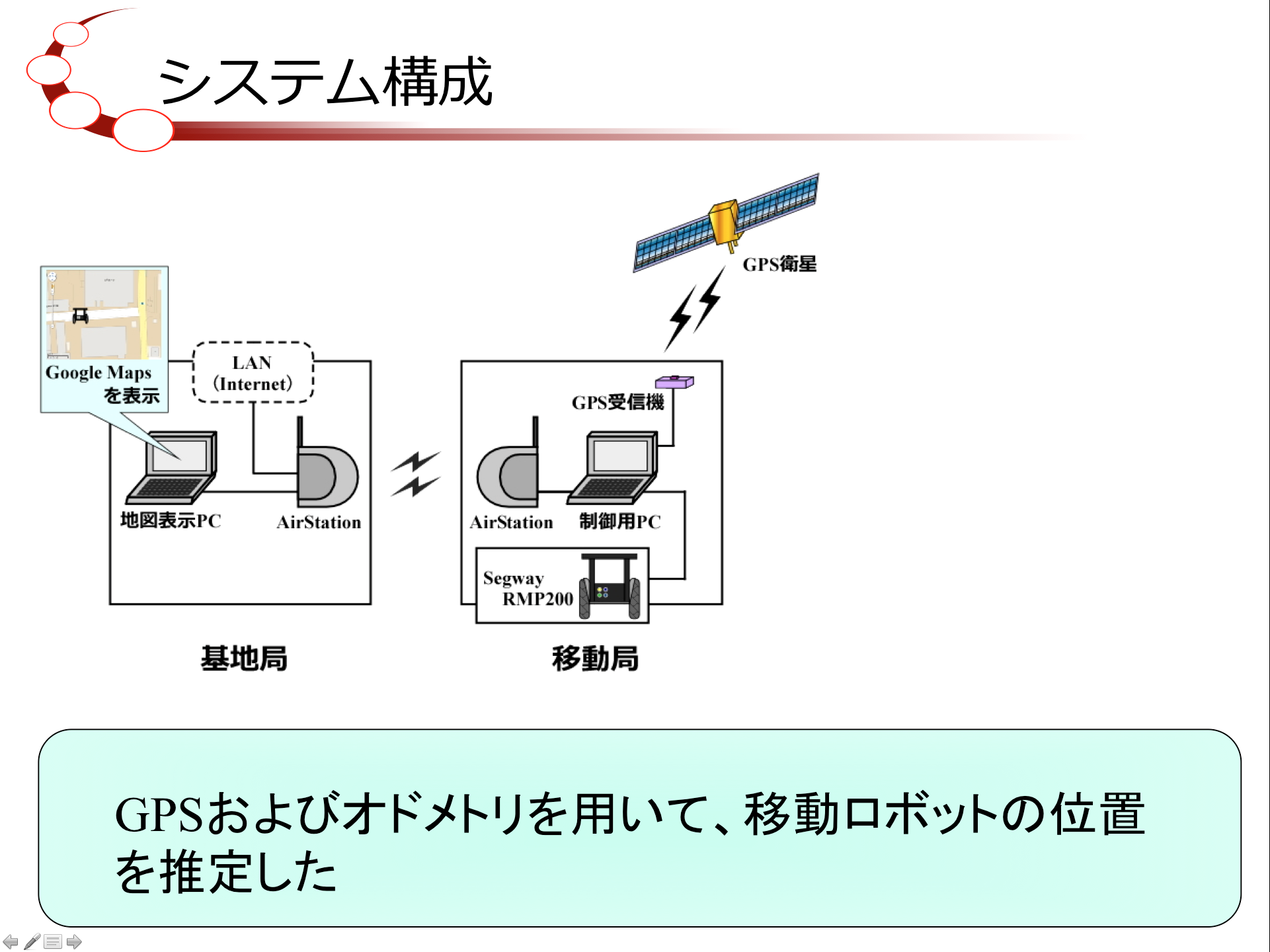
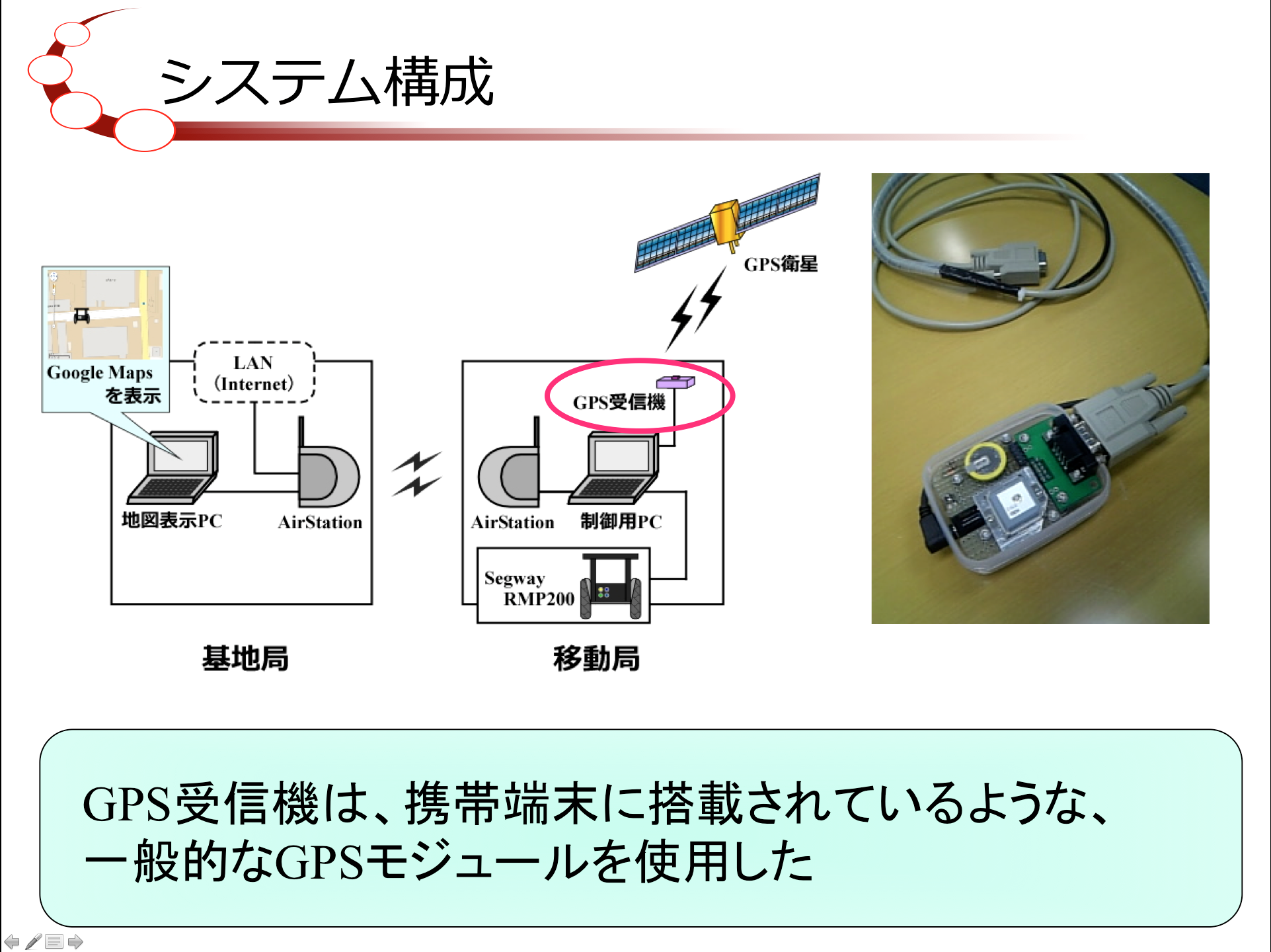
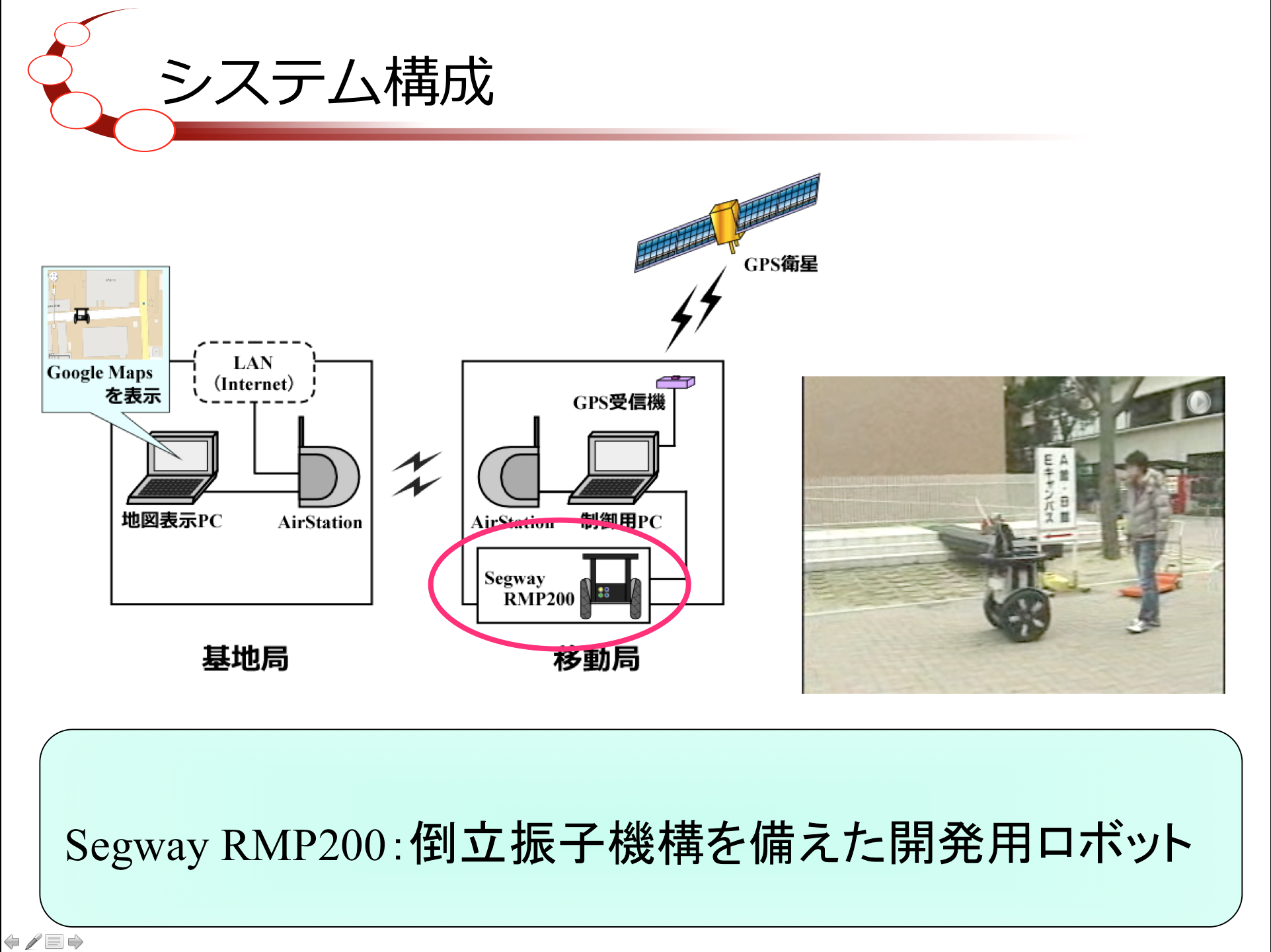
システム構成
H.Yagi