卒業論文テーマ紹介
メカトロニクス研究室
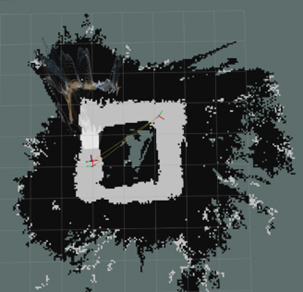
SLAMを用いた移動ロボットの開発―自律移動による地図作成―
屋内を移動するロボットは,基本的に自分の位置がわかりません。そこで利用されるのがSLAMという技術です。SLAMは,自分の周りの地図を作成しつつ、自分の位置を推定する技術です。本研究では、SLAMを用いて未知環境下で移動ロボットが自律的に移動可能な地図の作成をめざしました。そこで,作成された地図の再現性や実用性を検討しました。下の図は、作成された地図を表しており、灰色のところがロボットが通過できる通路を示しています。
先端加工システム工学研究室
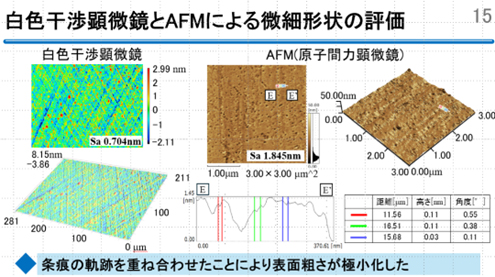
PCD砥石によるSiC基板の無歪鏡面加工技術に関する研究
SiC基板の無歪鏡面加工を目的として、PCD高密度切れ刃による定圧研削加工を実施しました。定圧による研削加工では、切れ刃状態に応じて送り速度が適正に制御されます。PCD高密度切れ刃では、緻密な切れ刃により過剰切込みがなく、延性モード加工が可能となります。切れ刃高さの均等化処理により、一刃当たりの切込み安定化を図った結果、表面粗さSa0.7nmと最終研磨に匹敵する鏡面を得て、高能率鏡面加工実現の見通しを得ました。
信頼性工学研究室
薄膜の非零ガウス曲率を有する曲げに関する基礎的研究
体表面に接触させて利用する生体センサーなどの先進的な電子デバイスは、複雑な屈曲変形時にもその性能を担保する必要があります。ただし、そのような変形を自在に生じさせて検査する技術は未だ十分ではありません。本研究では薄膜をねじりながら曲げることで、ガウス曲率が零となるような複雑な屈曲状態を発生させることが可能な試験方法を考案し、そのプロトタイプを用いた試験評価に成功しました。
熱エネルギーシステム工学研究室
水熱半炭化バイオ燃料の構成高分子組成に基づくエネルギ特性の推定
2050年のカーボンニュートラル社会構築の実現に向けて、「脱石炭」が全世界において差し迫った課題となっています。その対応策として植物資源由来のカーボンニュートラル燃料である固体バイオ燃料による石炭代替が考えられます。バイオマスの改質技術として水熱半炭化処理に着目し、産業用の炉・ボイラ側から要求される所定のエネルギ特性を有する水熱半炭化バイオ燃料の改質製造条件を汎用的に推定する方法を提案しました。
熱エネルギーシステム工学研究室(バイオコークス研究所との共同研究)」
木タールピッチを結合剤としたスギ炭化燃料の圧縮強度特性
2000年代に入り、アジア圏におけるエネルギ消費が激増しています。今日のエネルギ消費に支えられた豊かな生活を続けるには、未利用資源の有効活用や廃棄資源の再循環が必要不可欠です。近畿大学で開発されたバイオコークス製造技術を基盤に、炭化処理をしたスギ、ならびに炭化処理中に発生する木タールピッチを原料とした炭化固体バイオ燃料を成型し、その強度特性を調べることにより、固形化条件の抽出に成功しました。
ソフトロボット制御学研究室
空気圧人工筋を用いた単脚ロボットの開発と性能評価
国内外で人と共生するヒューマノイドの開発が進められています。本研究の目的は,人工筋肉を用いた省スペース・省エネルギーな駆動システムを提案し、共生型ヒューマノイドの実現に資する知見を得ることです。空気圧駆動系を搭載した単脚ロボットを試作し、シミュレーションに準じた歩行動作の実機実証を行いました。その結果、歩行を実現でき、人工筋肉を用いたヒューマノイドロボット開発に向けた第一段階の達成を示しました。
固体力学研究室
ランダム一方向材の微視構造の確率場モデリングとメゾモデリングにおける局所特性および強度解析の比較
強化繊維と母材からなる繊維強化材料は良好な特性を持ち、さまざまな分野で利用されています。一方、ミクロに見ると非常に複雑かつランダムな状態となっており、それを考慮した特性評価が重要になります。本研究では、そのミクロな状態を直接解析した場合と、一旦平均化してから解析した場合で局所的な特性や強度にどのような差が出るかを調査しました。結果から、既存の手法の問題点が明らかとなり、新たな視点での研究の必要性が示されました。
機械振動学研究室
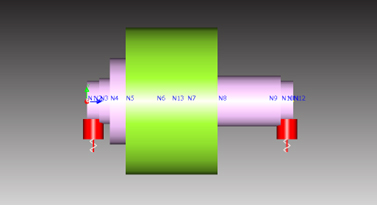
電気自動車用モータの振動シミュレーションに関する研究
電気自動車のモータは近年、航続距離を延ばすため、モータの小型軽量化が強く求められています。このためにはモータの高速化が必須ですが、高速化するとこれまで現れなかった振動が発生し、問題になることが予想されています。本研究では、実際の電気自動車に搭載されるモータを対象として、回転時における振動特性をシミュレーションする方法を確立し、モータ回転体の不釣合いや、ステータ部の位置ずれの影響を明らかにしました。
機械機能設計研究室
画像処理を用いた小型移動ロボットの走行制御に関する研究
本研究では、計算能力の限られた安価なマイコンを用いて、カメラの画像情報のみで機能する自律走行システム(EtoE)の構築に挑みました。画像処理をセンサ側へオフロードする分散処理手法によって画像認識と機体制御の両立を目指しました。その結果、視覚情報に基づく高度な数学的制御(LQR)の実装が可能となりました。外部センサに頼らず、単一のカメラ情報から高精度に安定走行する制御システムを確立しました。

応用エネルギー科学研究室
不凍性水溶液氷スラリーの静止時冷却性能に及ぼす氷充填率の影響に関する研究
近年、氷スラリーの特長である迅速な熱移動性や低温域での優れた温度保持性能に注目が集まり、食品・医療分野への応用が期待されています。しかし、従来研究では環境や人体への負荷が高い工業用不凍液が溶質として用いられていました。そこで食品にも用いられるトレハロースを溶質とした氷スラリーを対象に、静止条件下における冷却性能に及ぼす氷充填率の影響を明らかにする為にその熱伝達率および蓄冷性能を定量評価することで、静止冷却用途における設計指針の構築をめざしました。
発泡PLAを用いた3Dプリントモデルによるロストフォーム鋳造
鋳造分野では、効率化や省人化の観点から3Dプリンタの活用が進んでいます。本研究では、ロストフォーム鋳造法における消失模型を3Dプリンタで発泡PLAを用いて造形し、工業的実用化を見据えてその鋳造性を評価しました。さらに、内部充填率や注湯温度の違いが鋳造挙動に及ぼす影響についても検討しました。実験結果より、特に薄肉部における肉厚感受性に関する有益な知見が得られました。